(3) Stavba hexacopteru od A do Z
Toto je třetí díl seriálu o stavbě vlastního hexacopteru, první díl si můžete přečíst zde a druhý díl zde.
Část sedmá – Instalace osvětlení na ramenech
Před instalací motorů jsem se rozhodl nainstalovat osvětlení. Požil jsem standartní LED diodové pásky, které se dají koupit v každém elektru. Pro svůj případ jsem použil ještě zalité v čirém silikonu ( označení voděodolné ) a to z toho důvodu, aby se při transportu diody nepoškodily. Takto zalité jsou lépe chráněny. Ovládání osvětlení bude řešeno z vysílačky jedním kanálem a bude mít 3 stavy : Vypnuto – Osvětlení zadních ramen – Kompletní osvětlení. Vypínatelné osvětlení z toho důvodu, aby po instalaci kamery nebyla zbytečně „přisvěcována“ diodami. V tuto chvíli si někdo možná řekne, že na FPV copter je osvětlení zbytečné, ale pro mě ne. Přeci jen s copterem hodlám létat i neFPV a tam je docela vhodné vidět orientaci ve vzduchu. LED pásky jsem nalepil jak na spodek ramen, tak na vnitřní strany. Boční nalepení je vidět z přiložených fotek.
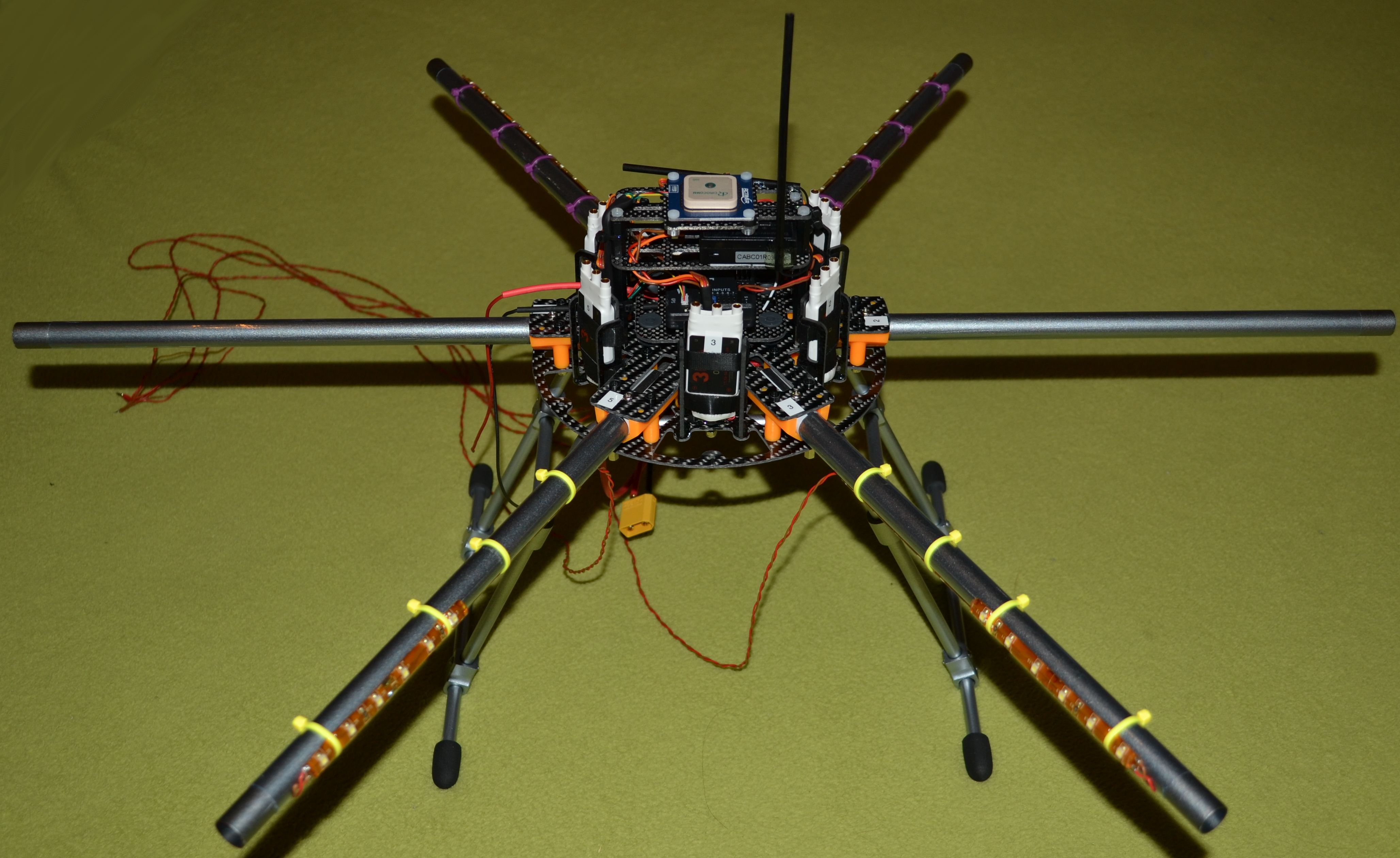
LED pásky nejsou lepeny přímo na duralová ramena, ale na ramenech je navlečena transparentní smršťovací bužírka a až na ni jsou nalepeny diodové pásky. Pro jistotu jsou ještě zafixovány stahovacími páskami. Přeci jen se při provozu zahřívají a mohly by se odlepit. A také na zakulaceném povrchu drží mnohem hůře než na rovném. A ta spodní smršťovací bužírka je jako ochrana před nechtěným zkratem, přeci jen člověk nikdy neví, co se stane. Na další fotce je vidět, jak LED pásky svítí.
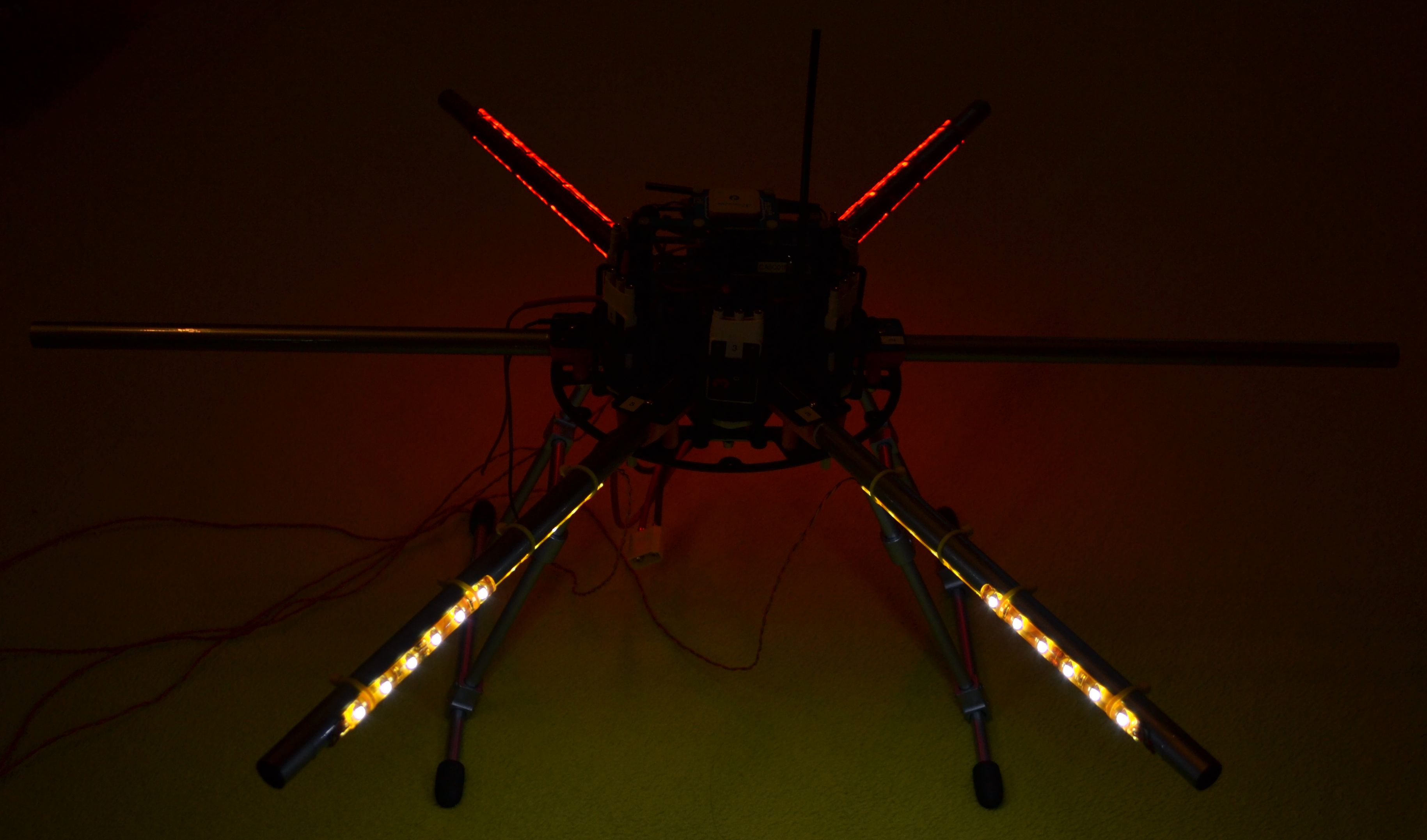
Pro odlišení polohy copteru jsem na přední ramena použil barvu bílou, na zadní barvu červenou. Barvy jsem si zvolil podle svého a nikde není psáno, že to takto musí být. Někdy jsem také použil na přední ramena zelené diody a na zadní červené. Někdo dokonce používá i modré diody, ale pro mě jsou modré diody ve vzduchu méně viditelné než jiné. Propojení ke spínačům ještě není doděláno, proto jsem zatím nechal vodiče delší a zkrátím je až při definitivním zapojení.
Část osmá – Instalace motorů
Pro pohon svého copteru jsem vybral po dlouhém rozmýšlení motory AXI 2217/20. Sehnal jsem je dokonce ve zvýhodněném balení a tak jsem se mohl pustit do práce. Bohužel proto, že tyto motory jsou v tomto setu, jsou již z výroby dodány s krátkými vodiči a taktéž s unašečem 8mm na vrtuli. Toto mi bohužel nevyhovovalo, proto jsem unašeče sundat a nechal si je odborně přesoustružit na průměr 6mm. Vodiče od motorů jsem nastavil vodiči se silikonovou izolací 1.5 mm2 a všechny spoje jsem překryl smršťovací bužírkou. Jelikož je izolace na vodičích poměrně náchylná k poškození, použil jsem opět smršťovací bužírku a ještě jednou jsem vodiče zakryl, tentokrát ve větší délce a to skoro až od motoru až dovnitř do ramene, kudy vodiče verou. Samozřejmě i na druhé straně, kde vodiče opouštějí rameno, nasadil jsem také bužírku, aby bylo vše důkladně chráněno. Jakmile jsem motory nainstaloval, stačilo již na konce vodičů napájet konektory Gold 3.5mm, vše zapojit a pustit se do testu směru otáčení motorů.
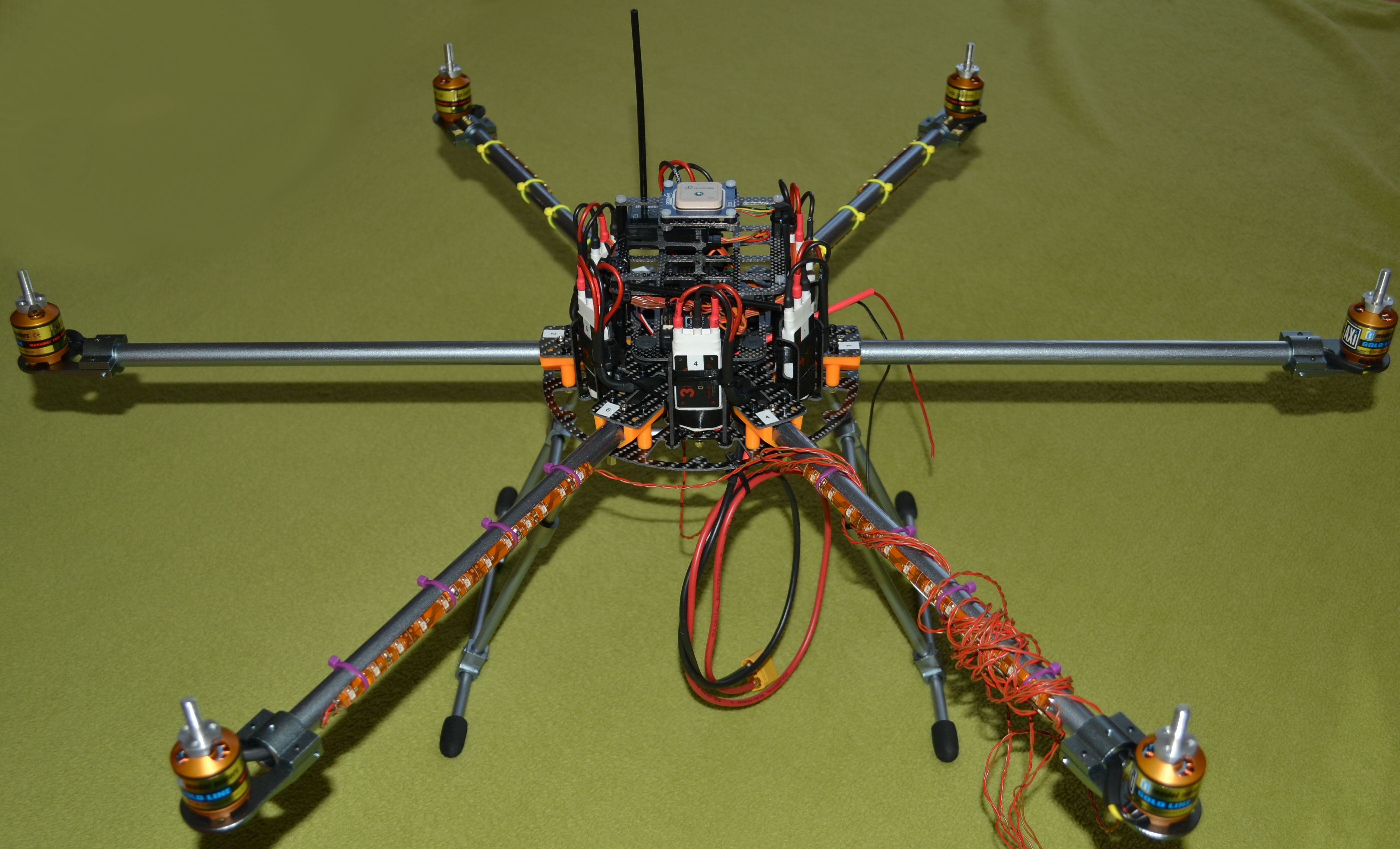
Směr otáčení motorů je nesmírně důležitý, neboť je dáno, kam se který motor má otáčet a také, kde má být vrtule tažná a kde tlačná. Na vyzkoušení směrů otáčení je nespočet metod, ale já používám 3 základní :
- hned při skládání pomocí servotesteru
- aktivace desky a roztočení motorů
- u ArduFlyera použít režim CLI a spustit motorvý test
V mém případu jsem první metodu nemohl použít, protože v době instalace reglů ješě nebyly motory k dispozici. Druhá metoda je již použitelná, ale poměrně nepohodlná, protože deska se automaticky deaktivuje po chvíli nečinnosti a tak se musí stále znovu aktivovat. Já jsem nakonec použil režim CLI ( Command Line Interpreter ) a v něm jsem aktivoval režim testu motorů. V tomto režimu je každý motor spuštěn na cca 1 vteřinu a poté opět vypnut. Takto jsou otestovány všechny motory a pokud se některý točí obráceně, staří jen na reglu prohodit libovolné 2 vodiče a bude se točit správně. Funkci testu motorů ukazuje následující video.
Já jsem si je označil barvami tak, abych prostřední vodič mohl nechat zapojený stále a v případě potřeby prohodil jen krajní vodiče.
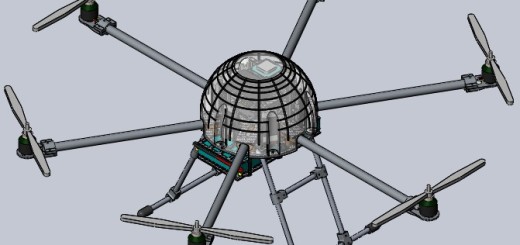
Část devátá – Instalace vrtulí a baterie
Stavba se již dostává do své poslední fáze a do letuschopnosti zbývá jen nainstalovat vrtule a baterii a může se letět! Vrtule jsem chtěl původně použít APC SF 11 x 4.7 a APC SFP 11 x 4.7, ale naskytla se mi možnost koupit za stejnou cenu vrtule uhlíkové RcTimer 11 x 4.7 a proto jsem je osadil. Dokonce i vnitřní průměr ve vrtulích odpovídal unašečům, takže jsem nemusel nic upravovat. Samozřejmě jsem všechny vrtule vyvážil, takže by neměl být žádný problém s vibracemi a podobnými „nešvary“. Jako další jsem nainstaloval držák baterie. Ten je uchycen pod základní deskou na 6-ti distančních sloupcích a je tvořen uhlíkovými deskami, mezi které se vkládá baterie. Názorně to je vidět na následujících fotografiích.


Po nainstalování vrtulí je již copter připraven na první let. Sice ještě neobsahuje kameru ani FPV vybavení, ale na první test je již připraven.

Samozřejmě napájecí kabel ve výsledku nebude vyveden tak jak je nyní, ale zkrátím ho až bude jasné, jak bude usazena baterie a jak vyjde těžiště. Zatím pro testy stejně použiju jednu „horší“ baterii co mám a až bude vše odladěno, osadím baterii, která je plánovaná a to GensAce 4s 5500mAh.


Nejnovější komentáře