(2) Stavba hexacopteru od A do Z
Toto je druhý díl seriálu o stavbě vlastního hexacopteru, první díl si můžete přečíst zde.
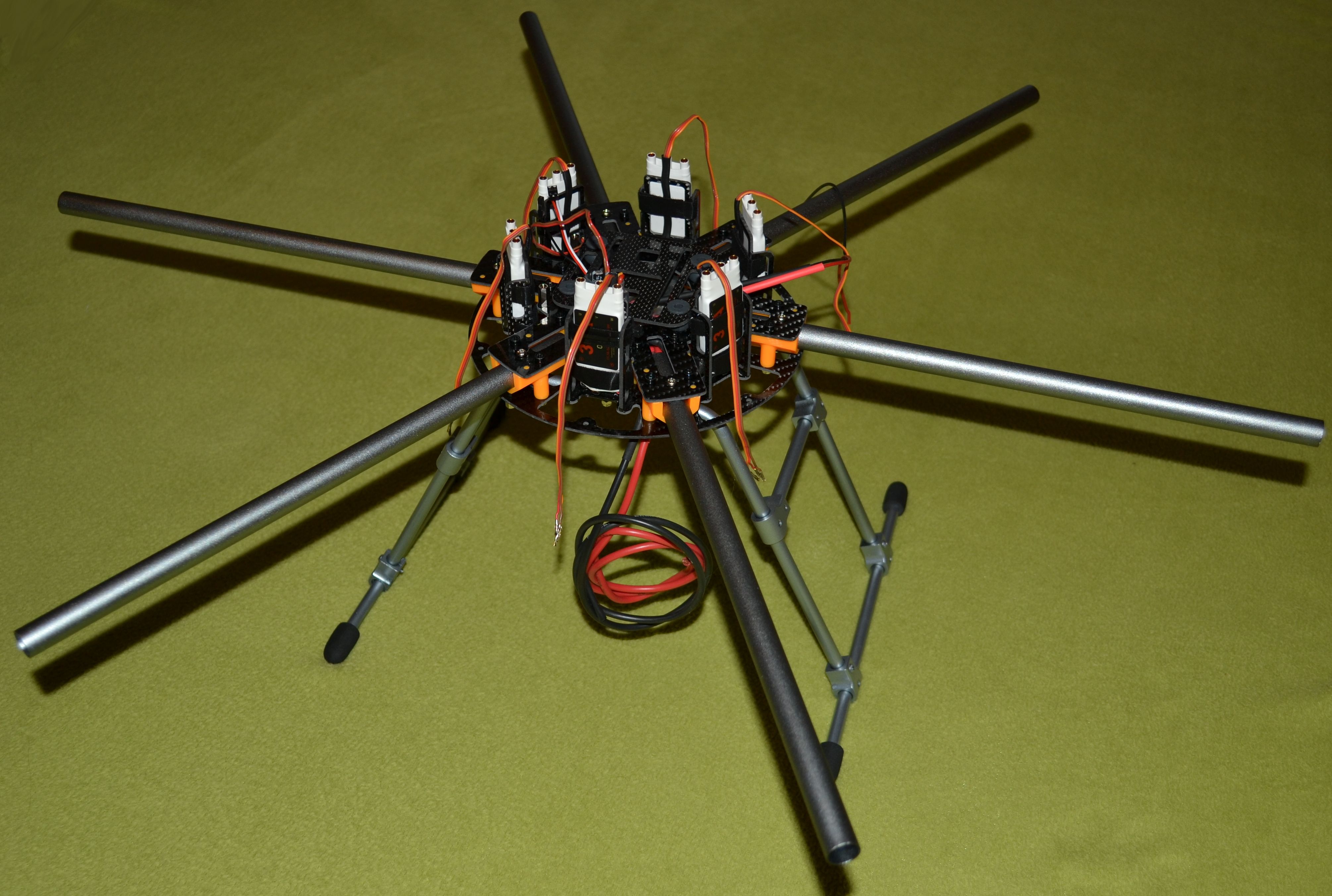
Část čtvrtá – Připevnění ramen
Na tento základ copteru je již možno namontovat ramena. Jelikož je rozvod elektřiny již hotov, nic nám nebrání rozvodné desky zakrýt vrchní nosnou deskou. V tuto chvíli je důležité upozornit na to, že regulátory nemají BEC, takže je nutno použít externí BEC a ten musí mít samozřejmě napájení. Použiji BEC také od firmy DJI a to ten samý, jako je dodáván k jednotce NAZA – M. Z tohoto důvodu jsem si připravil celkem 4 vývody ( 2 x + a 2 x – ) jednak pro napájení BECu, tak pro napájení osvětlení.
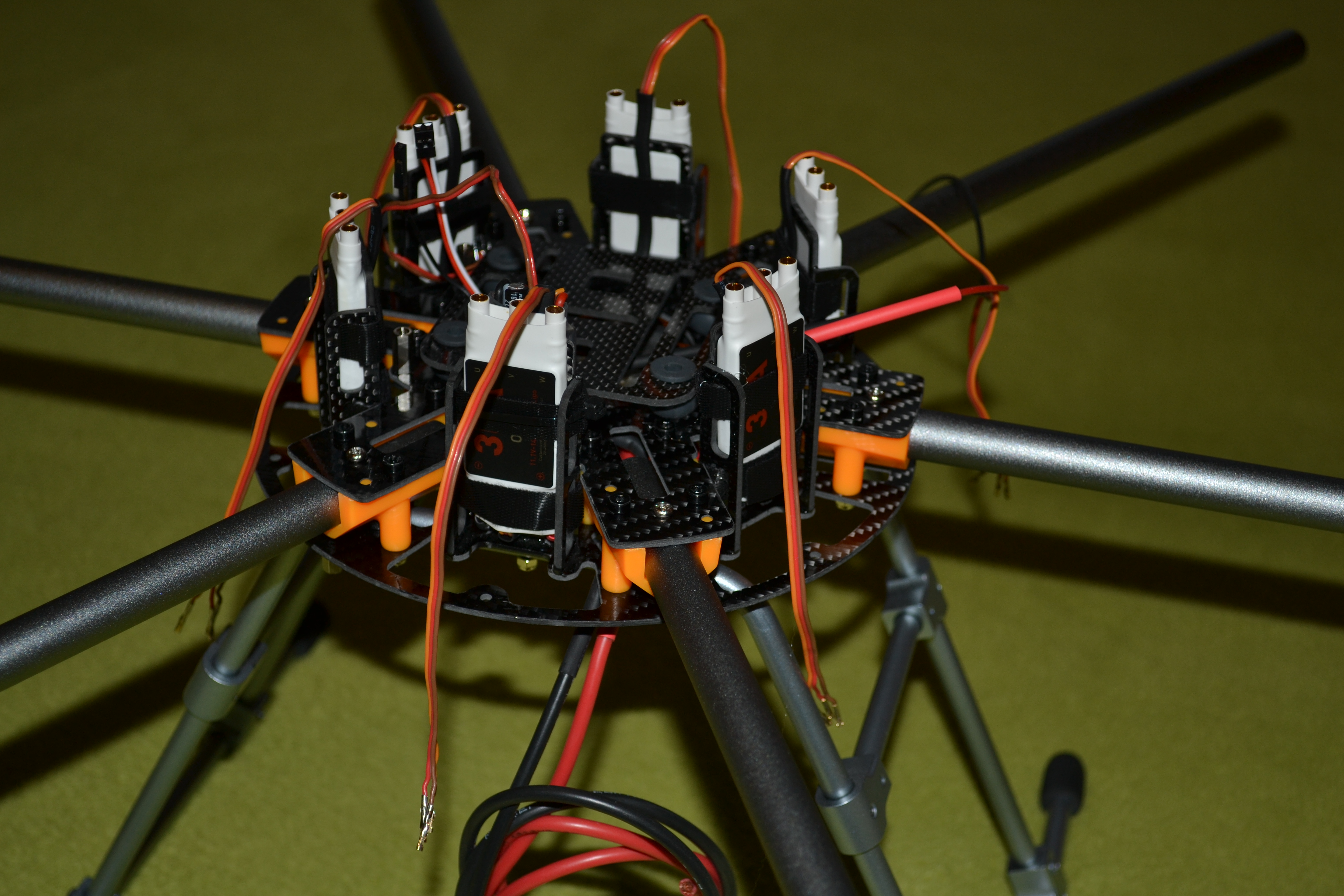
Na dalším snímku je detail na regulátory ( za předním je umístěn BEC ) a taktéž na desku, na které bude umístěna řídící jednotka. Jako řídící jednotku jsem vybral kopii Ardupilota od RCTimeru a to jejich desku pod označením Arduflyer.Je to kopie desky Ardupilot 2.5.
Část pátá – Instalace řídící desky a zapojení regulátorů
Dle doporučení výrobce je řídící deska přilepena oboustranou mechovou lepící páskou a umístěna je pro jistotu ještě na silikonových silentblocích ( soudečky ). Orientace desky musí být dodržena a to šipkou na desce směrem dopředu a připojovacími piny směrem nahoru.
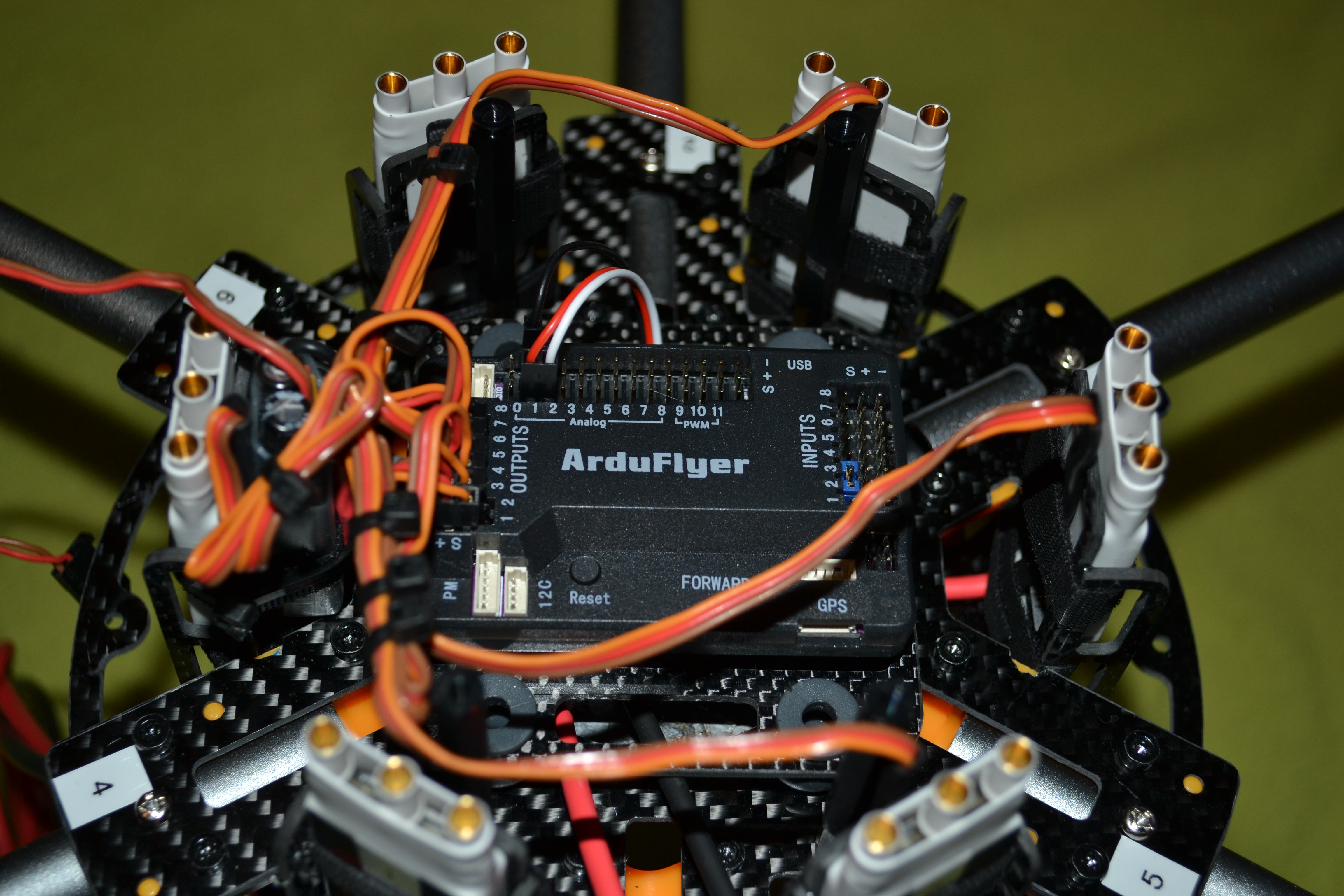
Jelikož je řídící jednotka v krabičce, instalace je jednoduchá a také je z popisu na krabičce hned vidět, kde jdou vstupy a kde jsou výstupy. Na fotografii jsou vstupy vpravo ( od přijímače ) a výstupy jsou vlevo ( k regulátorům ). Mezi těmito konektory jsou ještě nahoře piny pro připojení dalších komponent, jako stavové diody, senzor proudu, pípák, konektory závěsu kamery atd. Ve spodní části jsou vpravo konektory pro připojení GPSky a vlevo pro originální 3DR proudový senzor i s napájením a měřením. Ještě bych se zastavil u vstupů. Tato deska nabízí i zajímavou možnost použít od přijímače na prpojení pouze 1 kabel a to se signálem PPM. Stačí na jednotce spojit signálové piny 2 a 3 a do pinu 1 přivést PPM signál. Jediným omezením je to, že tento signál musí mít pořadí kanálů přesně podle kanálů na desce. V případě toto pořadí nesouhlasilo, ale pomoc je jednoduchá – vysílačka MX-20 HOTT umí v menu „promichat“ kanály dle potřeby a tak nebyl problém dosáhnout správného pořadí kanálů. Toto pořadí je následující : 1 – Roll, 2 – Pitch, 3 – Throttle, 4 – Yaw, 5 – Flight mode switch, 6 – 8 – další přídavné ovládaní, například pro aktivaci RTH, ladění parametrů za letu atd…
Část šestá – Instalace dalšího vybavení a částí rámu copteru
Po vyzkoušení přímo v programu Mission Planner v menu Radio Calibration jsem mohl přistoupit k instalaci dalšího vybavení, které bude umístěno na desce nad řídící jednotkou. Záměrně je tato deska uchycena přímo do horní základní desky a ne do desky s řídící jednotkou. Je to z toho důvodu, aby se do řídící jednotky nepřenášely vibrace z ostatních komponent. Na tuto zvýšenou desku je plánováno umístění přijímače a baterie pro videopřenos.
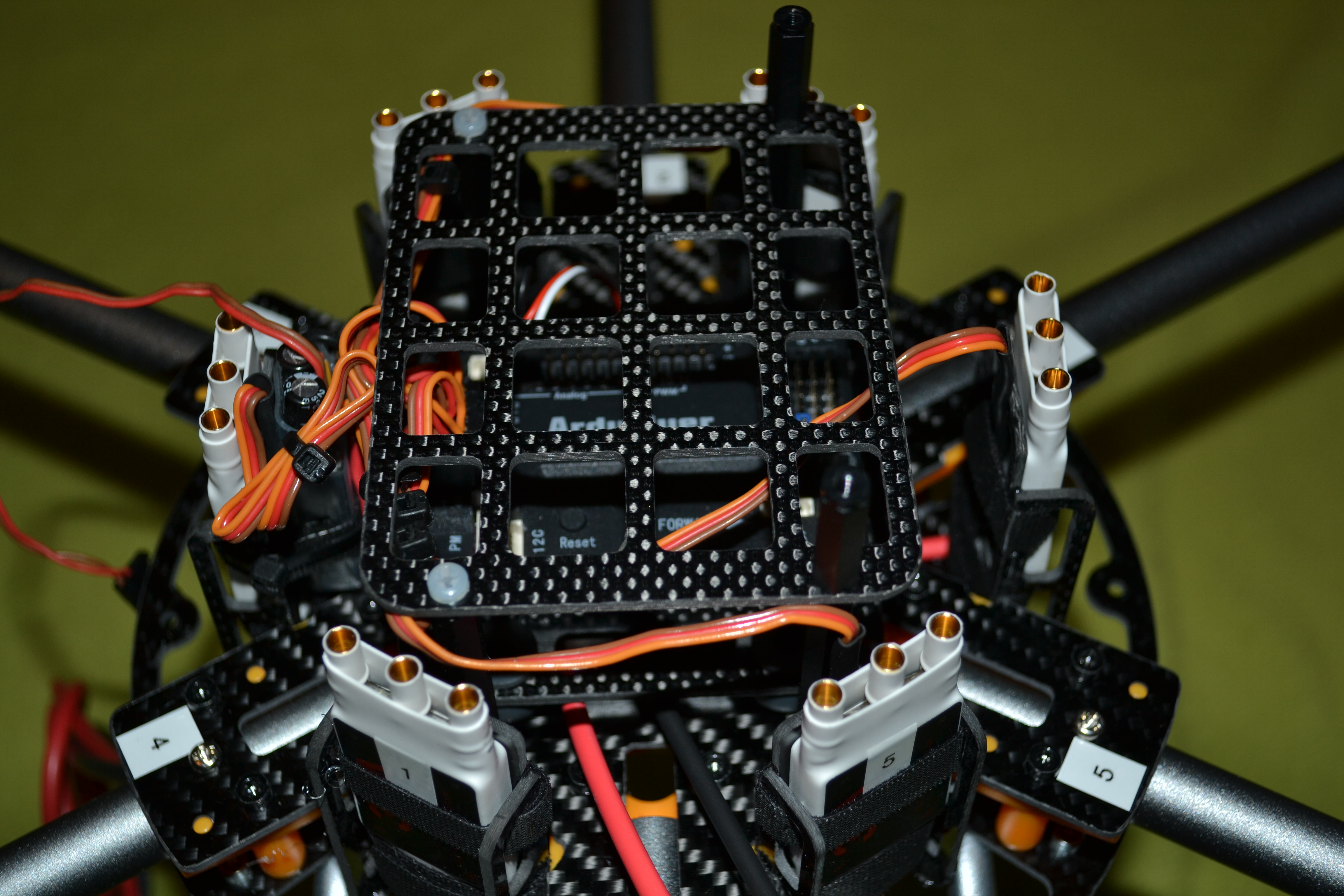
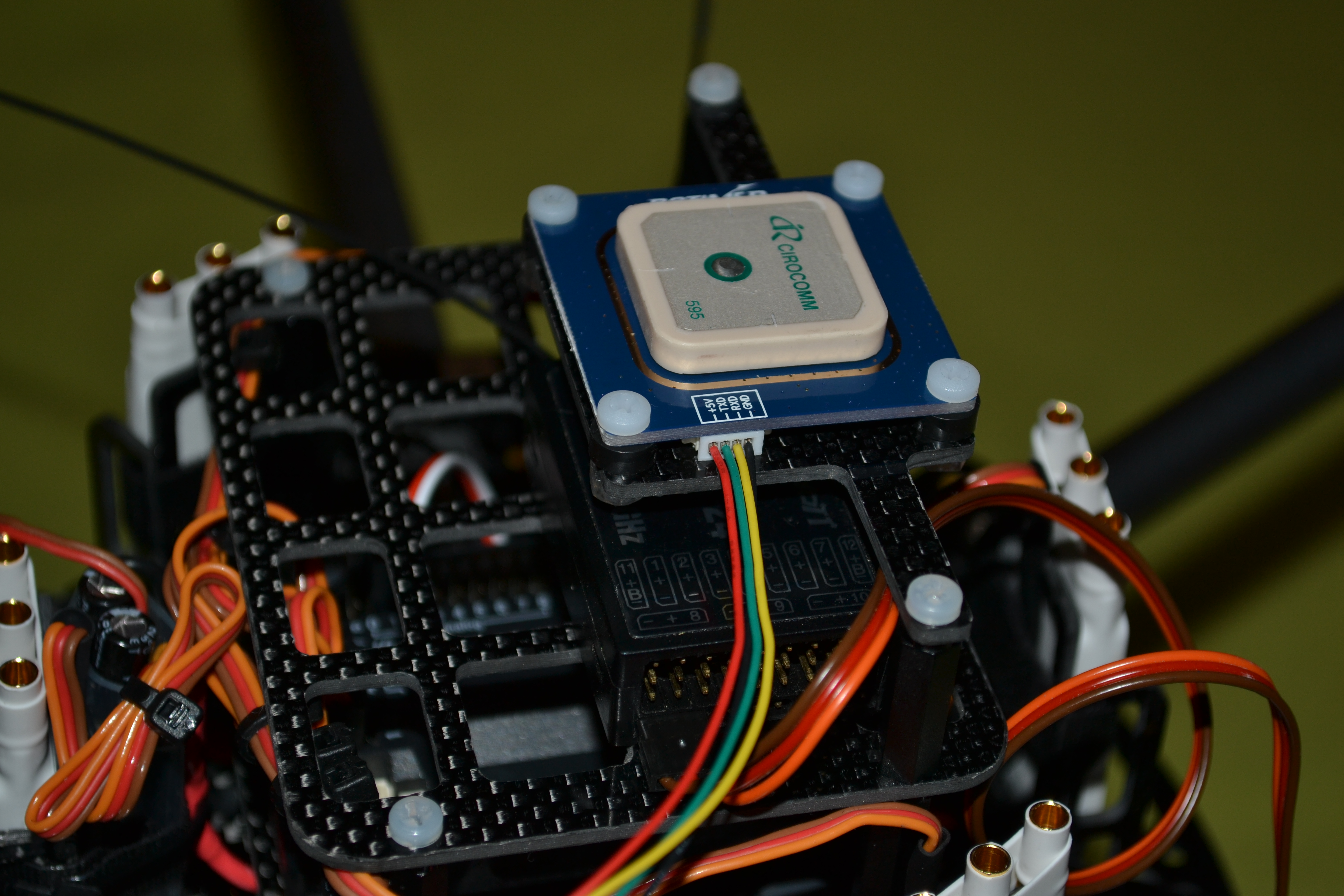
Na plastové distanční sloupky bude nakonec přidělána anténa GPS, aby měla „dobrý rozhled“ na oblohu a nebyla ničím stíněna.



Nejnovější komentáře